
Way back in the mists of time, I mentioned how we had laser scanners in the CVRG (one of which was mounted on Dagda for a while). We used the SICK for a long while, which is a block of steel that’s pretty adept at toe crushing, only scanned through a partial circle and was enormously expensive (and later we acquired a 3D scanner which was even more expensive but could at least do 360 degrees). That was fifteen years ago though.
Meet the modern version:

The YDLIDAR X4, evolved from roomba sensors and possibly a knockoff of a slightly more well-known sensor. Weighs next to nothing, costs $80, fits in the palm of your hand, scans through 360 degrees seven times a second taking 5000 samples in the process (so about half-degree resolution), ranges out to ten meters on a good day with a following wind.
Honestly, I think we’d have killed someone to get this back in the CVRG days.
Plug in, fire up the demo app (on linux, macos is unsupported, there is a windows sdk but I’m not that sick in the head yet)…

Remarkably trouble-free setup.
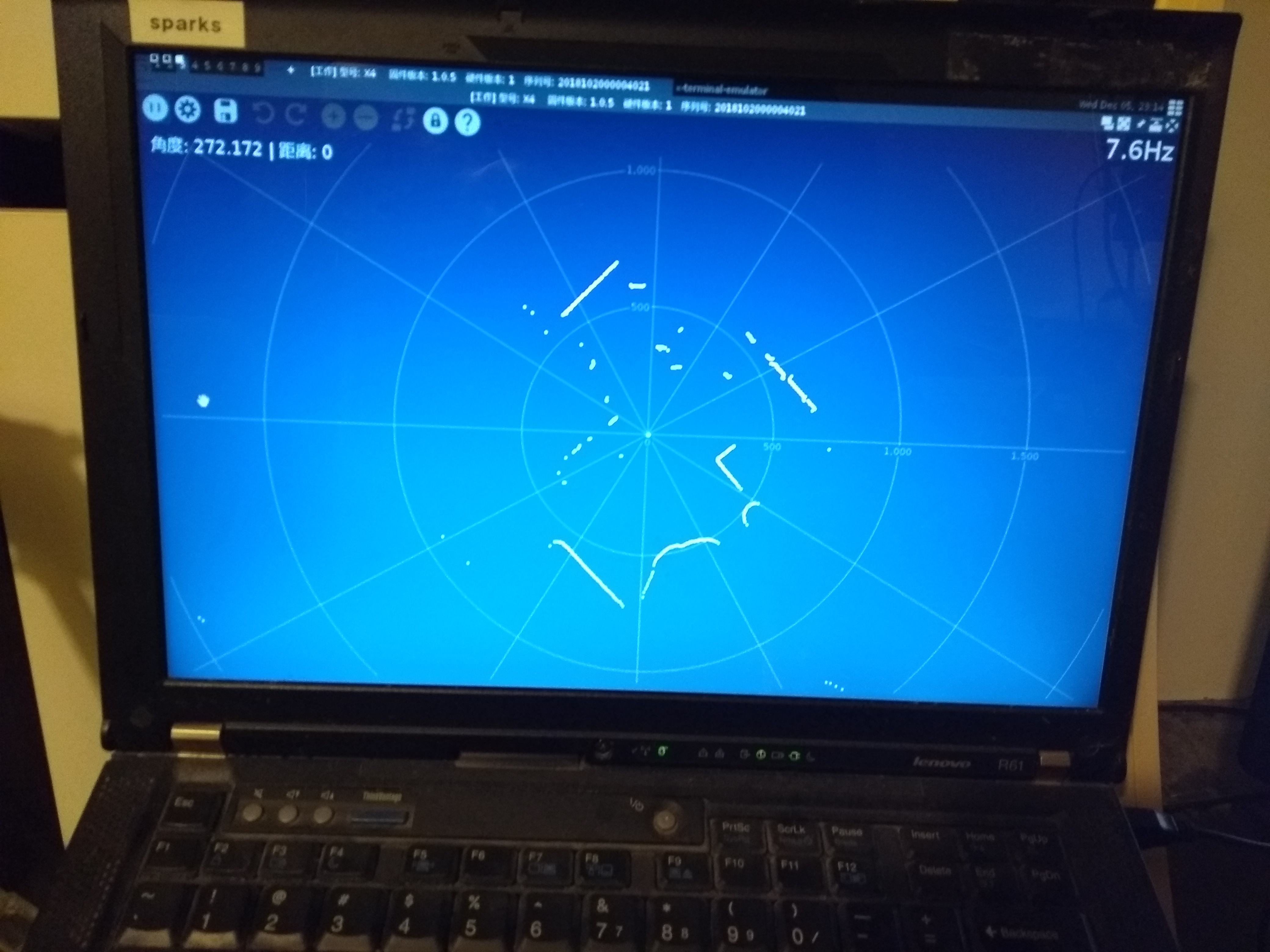
That curve at the bottom is me, the sharp angle at the 3-4 o’clock is the box the scanner came in, and you can see the back walls of the desk at 11 and 2 o’clock on the diagram.
There shall be more playing with this 😀




